Email: Gustavo@hengrytech.com Tel: +86-577-67318236
![]()
![]()
![]()
![]()
![]()
Email: Gustavo@hengrytech.com Tel: +86-577-67318236
![]()
![]()
![]()
![]()
![]()


1、AC power supply: AC 220V±10% 50HZ; 2、Input power: about 1.5 kW; 3, the working environment: temperature: -10 ~ 40 ℃; ambient humidity: ≤ 90% (25 ℃); 4, equipment dimensions: length × width × height = 2000mm × 1300mm × 1600mm
Equipment Module Components

Equipment Overview
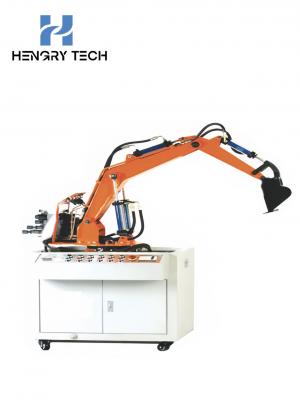
Industrial robot is the key equipment of automated production process, which can be used in manufacturing, installation, testing, logistics and other production processes, and is widely used in many industries such as automotive vehicles and automotive parts, engineering machinery, electronic equipment, military, medicine, food, etc., and is also the core technology of Industry 4.0.
HRA-1803 industrial robot application technology platform (pictured above) is mainly composed of eleven structural modules such as SCARA robot, six-joint robot, vision detection, PLC, HMI, three-dimensional warehouse, transfer module, fixture conversion table, etc. Combining in-depth analyses of industrial robot application fields with the structural and application characteristics of industrial robots, it is developed for the new energy industry, food processing and Packaging industry, 3C industry, electrical and electronic industry, machinery industry and other industry applications of the comprehensive open platform. It can complete typical application tasks in many types of industries, such as food sorting and packaging, keyboard assembly line, electrical assembly, lithium battery packaging, coupling manufacturing and testing.
This practical training device/equipment is suitable for the practical training teaching of industrial robot technology, industrial robot installation and maintenance, electromechanical equipment installation and maintenance, electromechanical technology application, electrical operation and control, electrical technology application in schools. It is also suitable for vocational training schools, vocational education centres, appraisal stations of industrial robotics practical exercises, skills identification assessment. Using the HRA-1803 industrial robot technology application platform, you can simulate a control process that is very close to the actual production situation, so that learners can get a teaching environment that is close to the actual production. So that the students of professional knowledge of the study and comprehensive application of ability, industrial robots and PLC programming and networking capabilities, equipment installation and commissioning and other aspects of the skills to get better training.
Functional Features
4.1 Advanced configuration
The main devices of this equipment six joint robot, SCARA robot, PLC, HMI, inverter and other control devices using domestic and foreign technology, the main technology line embodies "an axis, a network and an ecological".
One axis, play the technical advantages of the drive shaft in high-precision control, high energy-efficiency control, high safety control in three aspects of better performance;
One network, in the industrial bus network and industrial Internet for customers to enhance the ability to weave the network, narrowing the gap with the world;
One ecology, on the other hand, includes several aspects: on the one hand, reconstruct and optimise the industrial ecosystem to achieve the end user to recover the cost within two years, so as to promote the wider application of robots and achieve the full landing of intelligent manufacturing. On the other hand, it is necessary to be physically active and make positive contributions to the ecology of the robot industry chain.
4.2 Advanced Processes
HRA-1803 industrial robot application technology platform consists of 11 functional modules such as SCARA robot, six-joint robot, robot fixture table, rotary table, warehouse, control module, inspection unit and so on. On top of this platform, typical application tasks of many types of industries can be accomplished, such as food sorting and packaging, keyboard assembly line, electrical appliance assembly, lithium battery encapsulation, and coupling manufacturing and inspection.
Practical training project
Hardware Installation and Commissioning
Task I industrial robot installation and commissioning
Task two automatic fixture installation and commissioning technology
Task three three-dimensional warehouse unit installation and commissioning
Task four vision module installation and commissioning
Task 5 Installation and commissioning of raw material warehouse
Task 6 Multi-station rotary table installation and commissioning
Task 7 Installation and commissioning of three-dimensional warehouse
Task VIII electric slide transfer module installation and commissioning
The second electrical installation and commissioning
Task I industrial robot and controller electrical connection and commissioning
Task II industrial machine controller and PLC electrical connection and commissioning
Task three industrial robot fixture electrical connection and commissioning technology
Task four module sensor installation and commissioning
Task V man-machine interface electrical connection and commissioning
Task VI pneumatic circuit installation and commissioning
The third part of the programming and commissioning and application
Task 1 Industrial robot programming
Subtask I Industrial robot trajectory operation writing
Sub-task two robot matrix algorithm application
Sub-task three robot signal configuration and application of practical training
Sub-task four robot logic judgement program writing
Sub-task V Application of robot end quick-change tooling
Subtask six industrial robot palletising operation writing
Subtask VII Establishment and application of robot control database
Subtask VIII Control of robot operation through I/0 boards
Subtask 9 Debugging of industrial robot operation process through computer software
Subtask X Robot vision process package application
Subtask XI Socket Socket Communication Application
Subtask XII Application of Robot Dynamic Following
Sub-task 13 Application of robot vision instructions
Task two PLC programming
Sub-task 1 PLC basic instruction application training
Sub-task 1 PLC and frequency converter communication technology application training
Sub-task three PLC and servo drive communication technology application training
Sub-task four PLC and touch screen communication technology application training
Sub-task 5 PLC and industrial robot communication technology application
Task 3 Visual programming
Sub-task 1 Application of visual digital detection technology
Sub-task two robot vision instruction application
Sub-task two visual scripting programme writing
Contact: Gustavo Zhang
Phone: +86 18966252578
Tel: +86-577-67318236
Email: Gustavo@hengrytech.com
Add: Yongjia county, wenzhou city, zhejiang province ou the five-star industrial zone north street