Email: Gustavo@hengrytech.com Tel: +86-577-67318236
![]()
![]()
![]()
![]()
![]()
Email: Gustavo@hengrytech.com Tel: +86-577-67318236
![]()
![]()
![]()
![]()
![]()




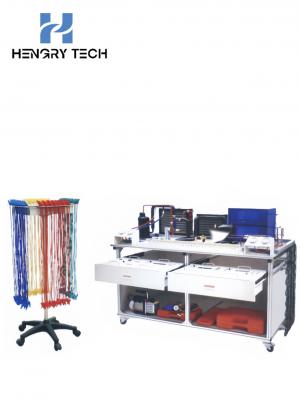
1. AC power supply: single-phase AC 220 V±10% 50Hz; 2. Temperature: -10 ~ 50 ℃; ambient humidity: ≤ 90% no water beads condensation; 3. External dimensions: length × width × height = (1750 × 1350 × 1600) mm 4. Power consumption of the whole machine: ≤1.6kW
Equipment Overview
With the transformation and upgrading of modern manufacturing and service industries, industrial robots are increasingly used in the fields of measurement and inspection, packaging, sorting and handling, handling, palletising, filling, machine loading and unloading, assembly, metal cutting, welding, spraying and so on. Applications in different fields will put different requirements on robot installation, programming and commissioning personnel. According to the real industrial situation, Hengry designed and developed HRA-1806 industrial robot training equipment (mouse assembly).HRA-1806 can be the wireless mouse of the loose parts (wireless receiver, battery, back cover, bottom plate), through the collaboration of two ABB robots, will be the wireless mouse assembly completed.
Functional features
1、HRA-1806 mainly consists of 2 workstations, which can be operated collaboratively or individually.
2, the process of the whole device is the wireless mouse of some loose parts for assembly.
Practical training project
Hardware installation and debugging
1, industrial robot base installation and commissioning technology
2, industrial robot installation and debugging technology
3, industrial robot fixture installation and commissioning technology
Electrical installation and commissioning
4, industrial robot body and controller between the electrical connection and debugging technology
5, industrial machine controllers and control cabinets between the electrical connection and debugging technology
6, industrial robot fixture electrical connection and debugging technology
7, the electrical connection between the robot and the robot
Programming debugging and application
8, industrial robot programming debugging software installation
9, industrial robots through the demonstrator of industrial robot operation process debugging
10, through the computer software on the operation of industrial robots debugging process
11, through the I / 0 board on the operation of the robot control
12、The establishment and application of robot control database
13, industrial robot assembly operation of the preparation
14, industrial robots running the preparation of plane trajectory
15, industrial robot vertical trajectory operation of the writing
16, programmable controller program writing and design
17, robot and programmable controller CClink communication settings
Maintenance and repair of equipment
18, according to the robot operating procedures for robot safety checks
19, according to the system's abnormalities, mechanical failure to carry out simple repairs and maintenance
20, daily, weekly and monthly inspection and maintenance of industrial robots
Contact: Gustavo Zhang
Phone: +86 18966252578
Tel: +86-577-67318236
Email: Gustavo@hengrytech.com
Add: Yongjia county, wenzhou city, zhejiang province ou the five-star industrial zone north street